1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
| clc;clear;close all;
l1 = 92.4;
l6 = 350;
l3 = 757.4;
omegal1 = -2.4*pi;
H1 = 100;
G3 = 200;
G5 = 700;
J_s3 = 1.1;
l_s3 = l3/2;
g = 10;
disp("代码说明:x右为0度,涉及转动的,逆时针为正,笛卡尔坐标系")
ifzu = input('你是组长吗?,是为1,不是为0\n');
if ifzu == 1
MyPar = parpool;
ifzhouqi = input('周期绘图?,是为1,不是为0\n');
if ifzhouqi == 1
nzhouqi = input('几个周期?\n');
v = [];
a = [];
s = [];
Mb = [];
for i = -nzhouqi*2:0.01:0
phy1 = pi*i;
[vi,ai,si,Mb_i] = sol_wzr(l1,l6,l3,omegal1,phy1,G5,G3,g,l_s3,J_s3);
v = [v,vi];
a = [a,ai];
s = [s,si];
Mb = [Mb,Mb_i];
end
phy1_n = (-nzhouqi*2:0.01:0)*pi;
end
if ifzhouqi == 0
v = [];
a = [];
s = [];
Mb = [];
for i = -2:0.001:0
phy1 = pi*i;
[vi,ai,si,Mb_i] = sol_wzr(l1,l6,l3,omegal1,phy1,G5,G3,g,l_s3,J_s3);
v = [v,vi];
a = [a,ai];
s = [s,si];
Mb = [Mb,Mb_i];
end
phy1_n = (-2:0.001:0)*pi;
end
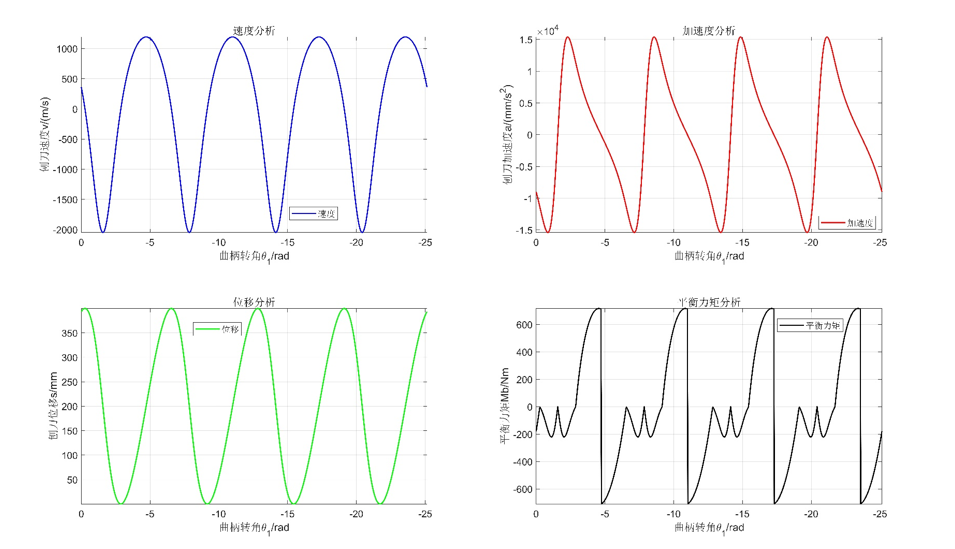
set(gcf, 'Color', [1 1 1]);
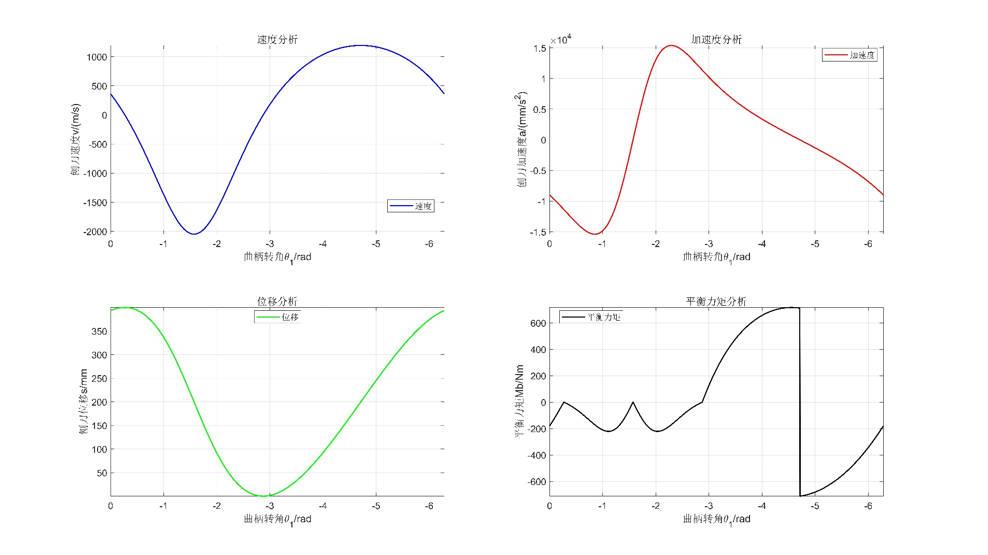
subplot(2,2,1)
plot(phy1_n,v,'LineWidth',1.5,'Color','b')
title("速度分析",'FontSize',14)
xlabel('曲柄转角\theta_1/rad','FontSize',12)
ylabel('刨刀速度v/(m/s)','FontSize',12)
hold on;
grid on;
axis tight;
set(gca, 'XDir', 'reverse');
set(gca, 'FontSize', 12)
legend('速度','Location','best')
subplot(2,2,2)
plot(phy1_n,a,'LineWidth',1.5,'Color','r')
title("加速度分析",'FontSize',14)
xlabel('曲柄转角\theta_1/rad','FontSize',12)
ylabel('刨刀加速度a/(mm/s^2)','FontSize',12)
hold on;
grid on;
axis tight;
set(gca, 'XDir', 'reverse');
set(gca,'FontSize',12)
legend('加速度','Location','best')
subplot(2,2,3)
plot(phy1_n,s,'LineWidth',1.5,'Color','g')
title("位移分析",'FontSize',14)
xlabel('曲柄转角\theta_1/rad','FontSize',12)
ylabel('刨刀位移s/mm','FontSize',12)
hold on;
grid on;
axis tight;
set(gca, 'XDir', 'reverse');
set(gca,'FontSize',12)
legend('位移','Location','best')
subplot(2,2,4)
plot(phy1_n,Mb,'LineWidth',1.5,'Color','k')
title("平衡力矩分析",'FontSize',14)
xlabel('曲柄转角\theta_1/rad','FontSize',12)
ylabel('平衡力矩Mb/Nm','FontSize',12)
hold on;
grid on;
axis tight;
set(gca, 'XDir', 'reverse');
set(gca,'FontSize',12)
legend('平衡力矩','Location','best')
delete(gcp('nocreate'));
pause;
end
if ifzu == 0
phy_for_you = input('输入你的角度(角度制),逆时针为正\n');
phy1_wzr = phy_for_you*pi/180;
[v_my,a_my,s_my,Mb_my,omegal3_my,alpha3_my,R_34_my,P_I3_my,M_I3_my,R_21_my] = sol_wzr(l1,l6,l3,omegal1,phy1_wzr,G5,G3,g,l_s3,J_s3)
pause;
end
function [v,a,s,Mb,omegal3,alpha3,R_34,P_I3,M_I3,R_21] = sol_wzr(l1,l6,l3,omegal1,phy1,G5,G3,g,l_s3,J_s3)
sb = sqrt((l1*cos(phy1))^2 + (l6+l1*sin(phy1))^2);
phy3 = acos(l1*cos(phy1)/sb);
sol1 = [cos(phy3) -sb*sin(phy3);...
sin(phy3) sb*cos(phy3)]\(omegal1 * l1*[-sin(phy1);cos(phy1)]);
omegal3 = sol1(2);
v23 = sol1(1);
sol2 = [cos(phy3) -sb*sin(phy3);...
sin(phy3) sb*cos(phy3)]\...
(-[-omegal3*sin(phy3) -v23*sin(phy3)-sb*omegal3*cos(phy3);...
omegal3*cos(phy3) v23*cos(phy3)-sb*omegal3*sin(phy3)]*sol1 ...
- omegal1^2*l1*[cos(phy1);sin(phy1)]);
alpha3 = sol2(2);
vd = -omegal3*l3;
v = vd*sin(phy3);
a = -omegal3^2*l3*cos(phy3) - alpha3*l3*sin(phy3);
s = l3*cos(phy3)+200;
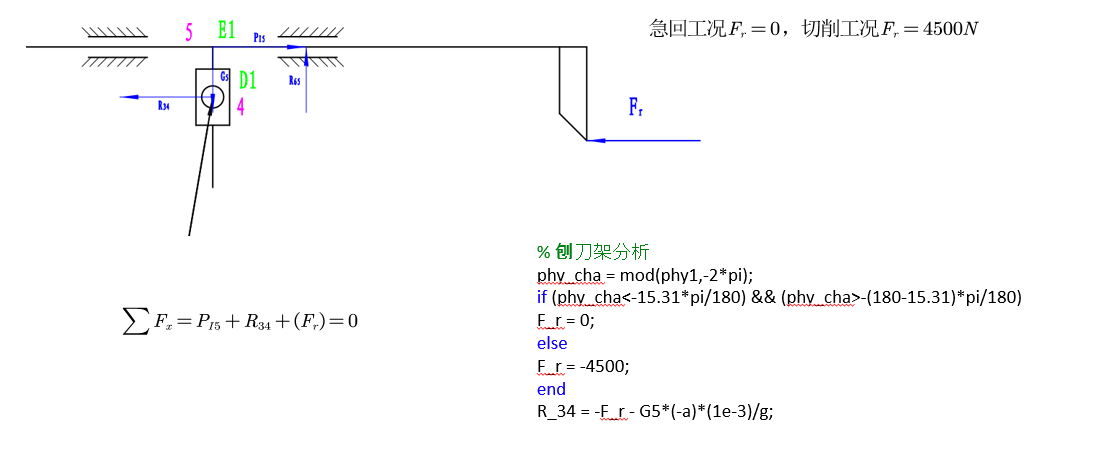
phy_cha = mod(phy1,-2*pi);
if (phy_cha<-15.31*pi/180) && (phy_cha>-(180-15.31)*pi/180)
F_r = 0;
else
F_r = -4500;
end
R_34 = -F_r - G5*(-a)*(1e-3)/g;
R_43 = - R_34;
a_s3x = -l_s3*(1e-3)*(omegal3^2*cos(phy3)+alpha3*sin(phy3));
a_s3y = -l_s3*(1e-3)*(omegal3^2*sin(phy3)-alpha3*cos(phy3));
P_I3x = -G3*a_s3x/g;
P_I3y = -G3*a_s3y/g;
P_I3 = sqrt(P_I3x^2+P_I3y^2);
M_I3 = -J_s3*alpha3;
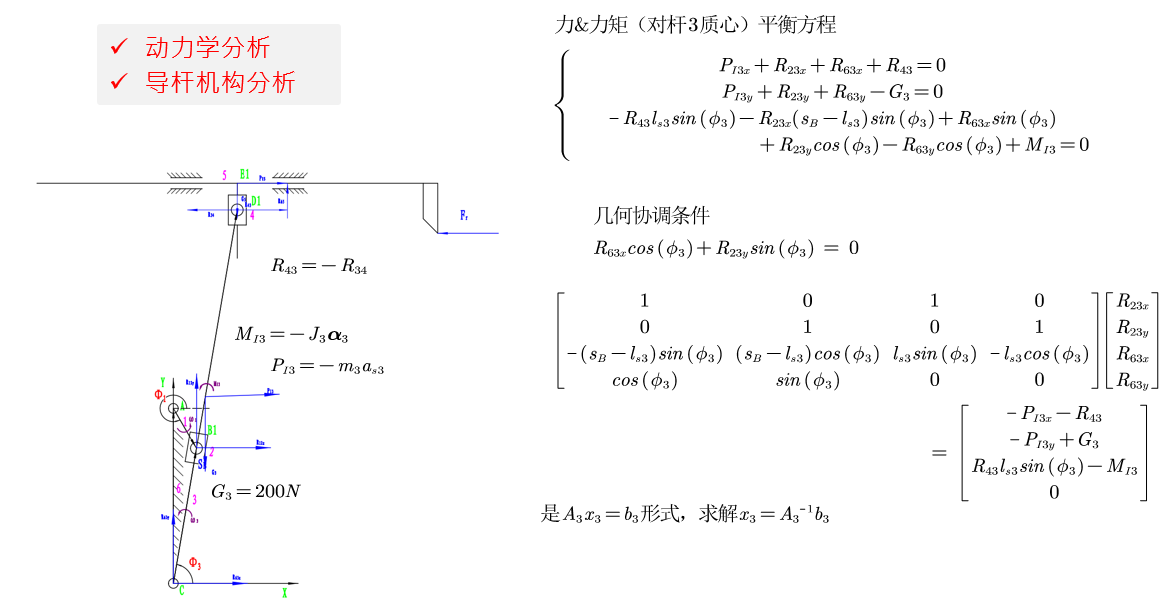
sol3 = [1 0 1 0;
0 1 0 1;
-(sb-l_s3)*(1e-3)*sin(phy3) (sb-l_s3)*(1e-3)*cos(phy3) l_s3*(1e-3)*sin(phy3) -l_s3*(1e-3)*cos(phy3);...
cos(phy3) sin(phy3) 0 0]\[-P_I3x-R_43;
-P_I3y+G3;
R_43*l_s3*(1e-3)*sin(phy3)-M_I3;
0];
R_23x = sol3(1);
R_23y = sol3(2);
R_21x = -R_23x;
R_21y = -R_23y;
R_21 = sqrt(R_21x^2+R_21y^2);
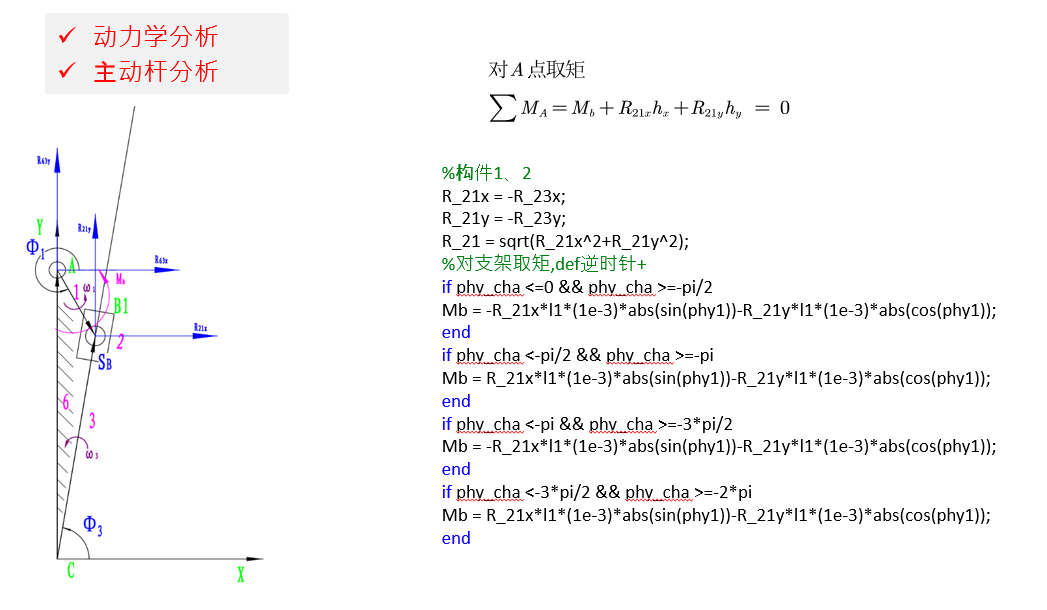
if phy_cha <=0 && phy_cha >=-pi/2
Mb = -R_21x*l1*(1e-3)*abs(sin(phy1))-R_21y*l1*(1e-3)*abs(cos(phy1));
end
if phy_cha <-pi/2 && phy_cha >=-pi
Mb = R_21x*l1*(1e-3)*abs(sin(phy1))-R_21y*l1*(1e-3)*abs(cos(phy1));
end
if phy_cha <-pi && phy_cha >=-3*pi/2
Mb = -R_21x*l1*(1e-3)*abs(sin(phy1))-R_21y*l1*(1e-3)*abs(cos(phy1));
end
if phy_cha <-3*pi/2 && phy_cha >=-2*pi
Mb = R_21x*l1*(1e-3)*abs(sin(phy1))-R_21y*l1*(1e-3)*abs(cos(phy1));
end
end
|